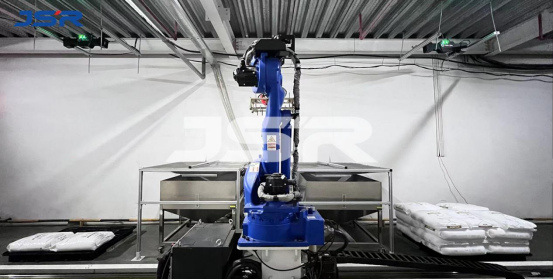
JSR's automatització de processos de manipulació robòtica amb YASKAWA El robot de manipulació s'aplica a la manipulació i desembalatge de bosses de partícules de plàstic, és aoperació de manipulació precisa, fiable i sostenible, aportant valor per promoure l'automatització de la producció.
No importa en els aspectes de maquinària, agricultura, confecció, construcció o vida quotidiana, podem veure la figura de les partícules de plàstic reciclades. Després de l'envasament, aquestes partícules s'han de manipular manualment, la qual cosa és un treball intermitent amb alt cost i alta intensitat de treball. El temps de treball anterior del client era de 8 hores i cada bossa de materials pesava 25Kg. L'eficiència manual és de 2 bosses per minut i es poden desmuntar 960 bosses en un dia. El temps de treball després de la manipulació i el desmuntatge del robot és de 24 hores, que es pot operar contínuament, i l'eficiència és de 3 bosses per minut i es poden desmuntar 4320 bosses en un dia.
Les solucions implementades per Jieshcat per als clients: robot de manipulació Yaskawa GP180, rail de terra de 7,5 m de llarg, contenidor de material, bastidor de material, càrrega màxima GP180 180 kg, abast màxim del braç 2702 mm. El recorregut efectiu de l'òrbita terrestre de 7,5 m és de 6 m, la velocitat de moviment és de 0,7 m/s. Sistema de supressió d'identificació visual 3D. Sistema d'obturació d'identificació visual 3D, càmera amb funció d'aprenentatge, a través de l'adquisició de dades primerenques del material i modelat posterior del material, de manera que la taxa d'èxit del reconeixement de la càmera és del 99,9%.
La producció automàtica millora molt l'eficiència del treball, la capacitat de producció estable, el lliurament precís, l'alta seguretat, l'ús raonable de l'àrea existent, millora la imatge corporativa i la neteja del taller, per aconseguir una producció no tripulada.
Hora de publicació: 26-set-2022
